RCPPuElite Design |
Воскресенье, 28.04.2024, 11:05 Приветствую Вас Гость Регистрация Вход |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Роботы-землекопы почистят Луну к возвращению людей
 Никакие кризисы не мешают людям мечтать о далёких целях. Например о возведении лунной базы. Но прежде чем она гостеприимно распахнёт Никакие кризисы не мешают людям мечтать о далёких целях. Например о возведении лунной базы. Но прежде чем она гостеприимно распахнёт свои двери для первых поселенцев, саму площадку под неё необходимо особым образом подготовить. Это могли бы сделать маленькие роботы, посланные на место заранее. Концепция такой строительной команды была обнародована на днях.
Посылать роботов на Луну человечеству не в диковинку. Но вот отправлять их для обустройства нашего спутника в преддверии высадки людей – никому ещё не доводилось (иллюстрация Astrobotic Technology).
Американская компания Astrobotic Technology при содействии университета Карнеги-Меллона (CMU) провела по заказу NASA исследование, в котором просчитала оптимальный вариант роботов для оборудования посадочной площадки на месте будущей лунной базы.
Задача эта не столь уж проста, как кажется, ведь небольшим машинкам предстоит переместить 1200 тонн реголита, причём управиться за несколько месяцев. Зачем это нужно — мы сейчас посмотрим. 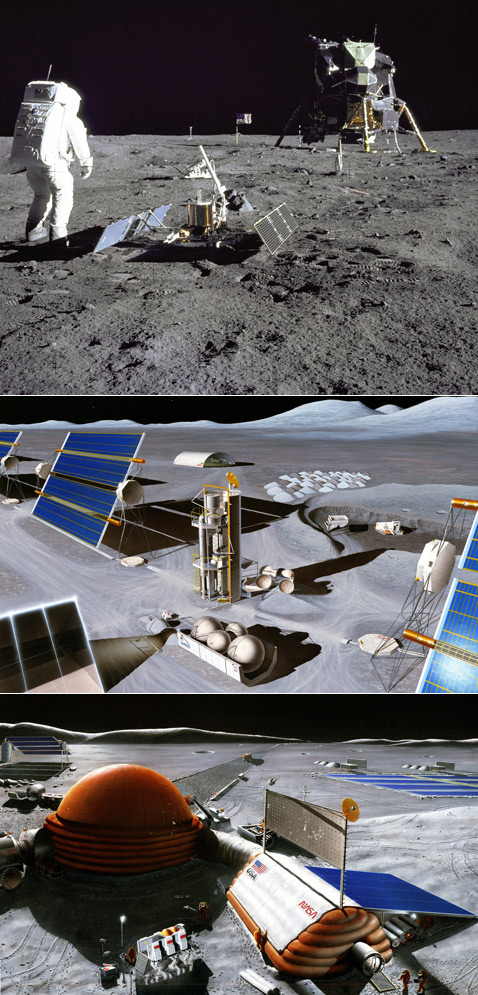 Вверху: Олдрин в "Базе Спокойствия". На время пребывания астронавтов на Луне их место работы вполне можно было назвать маленьким лагерем. Но базы будущего (внизу) должны раскинуться на гектары, а работать будут на постоянной основе (фото и иллюстрации NASA).
Итак, открываем наш виртуальный справочник. NASA детально проработало новую схему лунных экспедиций (отличную от той, что применялась 40 лет назад), сделало краеугольным камнем новых миссий возведение постоянной базы и подробно расписало план тестов и первых рейсов новых космических кораблей и ракет-носителей, создаваемых далеко не только для лунных вояжей. NASA экспериментирует с пилотируемыми луноходами и целыми комплексами машин. Продумано многое. Но на этом пути имеется ещё немало нерешённых проблем. И одна из главных – вредная пыль. Её мельчайшие частички с острыми гранями представляют собой настоящее бедствие: пылевая коррозия ставит под угрозу технику, а уж какое неприятное воздействие лунная пыль оказывает на человека (если просочится при пользовании шлюзами в герметичные помещения), и говорить нечего. А ведь есть ещё одно обстоятельство, способное усилить этот негативный фактор. Дело в том, что для эффективной работы базы необходимо, чтобы посадочные ступени с аппаратами поддержки (вода, грузы, топливо) регулярно садились в непосредственной близости от построек, дабы не везти всё это добро ещё за сотни или тысячи метров. 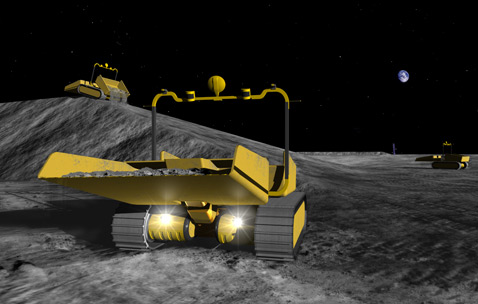 Лунным экскаваторам найдётся работа и до прибытия "основных сил", и после постройки базы тоже (иллюстрация Astrobotic Technology/Mark Maxwell). Лунным экскаваторам найдётся работа и до прибытия "основных сил", и после постройки базы тоже (иллюстрация Astrobotic Technology/Mark Maxwell).Но при каждом прилунении струи ракетных движков будут выбивать из слоя реголита новые порции опасных частиц, которые при отсутствии атмосферы будут обстреливать окружающие предметы, словно мощная пескоструйка. Чтобы этого не происходило, нужно обработать посадочную зону так, чтобы на ней не было "лунного песка", — заменить его слоем мелких камней или как-то сплавить. Либо нужно возвести вокруг посадочной площадки полукруглый бруствер со стороны базы, который отражал бы потоки газов и лунной пыли вверх, защищая тем самым постройки.  Общий вид базы, защищённой насыпями от потоков, поднимаемых садящимися и взлетающими ракетными модулями (иллюстрация Mueller and King, Astrobotic Technology/Mark Maxwell). Общий вид базы, защищённой насыпями от потоков, поднимаемых садящимися и взлетающими ракетными модулями (иллюстрация Mueller and King, Astrobotic Technology/Mark Maxwell).Астронавты, побывавшие на Луне, конечно, пробовали копать реголит и даже обрабатывать его граблями. Правда, последнюю операцию они проводили для поиска спрятанных в толще пыли камушков, которые могли бы представлять интерес для исследователей на Земле. 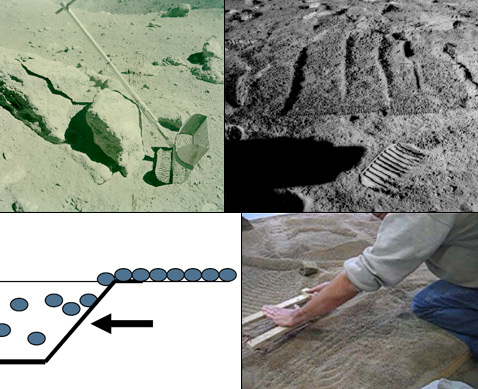 Настоящие лунные грабли и результат их действия. Внизу: современный опыт с вытаскиванием камней, скрытых в рыхлом грунте (иллюстрации NASA, Astrobotic Technology). Настоящие лунные грабли и результат их действия. Внизу: современный опыт с вытаскиванием камней, скрытых в рыхлом грунте (иллюстрации NASA, Astrobotic Technology).Но если мы хотим насобирать побольше местного гравия для засыпки посадочной зоны, нам придётся построить машины, способные "бороновать" Луну на очень приличной площади, да ещё и месяцами. Более реальным выглядит вариант с защитной насыпью. Так или иначе, необходимо убедиться, что роботам такое строительство под силу. И тут уж у специалистов американского космического агентства было немало резонов обратиться к Astrobotic Technology. Возглавляет эту фирму доктор Уильям Уайттекер (William "Red" Whittaker), основатель исследовательского центра автономных полевых роботов университета Карнеги-Меллона (Field Robotics Center), триумфатор гонки автомобилей-роботов и лидер проекта по отправке первого частного лунохода на место посадки Apollo 11. Кроме того, Уил – локомотив, упорно тянущий свою команду к лакомой цели — победе в соревновании Google Lunar X PRIZE.  Уильям Уайттекер и луноход Red Rover (второй прототип) на полигоне компании. Уильям Уайттекер и луноход Red Rover (второй прототип) на полигоне компании. Любопытно, что за точность высадки этого аппарата на место, где находится легендарный модуль Eagle, будет отвечать система от компании Raytheon, заимствованная у её противоспутниковой ракеты. После перелёта по трассе Земля-Луна электронные мозги (сверяя наблюдаемый ландшафт с ранее сделанными снимками Селены) должны уложить связку Artemis Lander/Red Rover в эллипс со сторонами 300 х 1000 метров (фото John Fleck). Небольшим лунным бульдозерам предстоит выполнить тяжёлую работу практически в автономном режиме, а именно на таких умных и выносливых аппаратах Уайттекер, что называется, собаку съёл. К слову, 6 февраля этого года американская Национальная инженерная академия (NAE) избрала Уильяма своим членом, в знак признания его заслуг на поприще робототехники. Вернёмся, однако, на Луну. Забрасывать на неё команду из десятков больших "землекопов" было бы слишком накладно. Но Astrobotic набросала эскизы скромных таких машинок весом всего в 150 килограммов и показала, что пара таких роботов сможет за 152 дня возвести насыпь в виде полукруга диаметром 50 метров при высоте этого бруствера в 2,6 метра. Поначалу инженеры придумали совсем простые машины, комбинацию гусеничного шасси и большого "совка", который служил бы и инструментом для рытья реголита, и ёмкостью для его транспортировки с места на место одновременно. 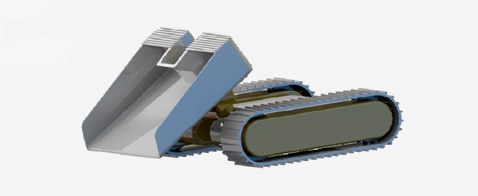 Первый вариант лунного бульдозера от Astrobotic (иллюстрация Astrobotic Technology/Mark Maxwell). Первый вариант лунного бульдозера от Astrobotic (иллюстрация Astrobotic Technology/Mark Maxwell).Скорость таких букашек составит 15 сантиметров в секунду. Грузоподъёмность этого варианта бульдозера достигает 4% от веса пустой машины. Работать аппараты должны практически постоянно, с перерывами на заправку аккумуляторов, для чего будут наведываться на специальную зарядную станцию. И 3/4 времени они должны тратить именно на транспортные работы. Простой вариант предусматривает и простое управление, и простой алгоритм работ. Но, увы, пара таких машин возвела бы одну насыпь только за 1170 дней. Это слишком много. А ведь на роботов намечается возложить и другие земляные работы на месте будущей базы. Они могли бы разровнять дорожки, убрать мешающие валуны, вырыть траншеи для размещения оборудования, возвести радиационные защитные насыпи для укрытия жилых отсеков и так далее. Когда они всё это успеют? Потому команда Уайттекера пошла на усложнение своих роботов — помимо бульдозерного ножа на них решили поставить самосвальный кузов, в который реголит пересыпался бы из переднего ковша. 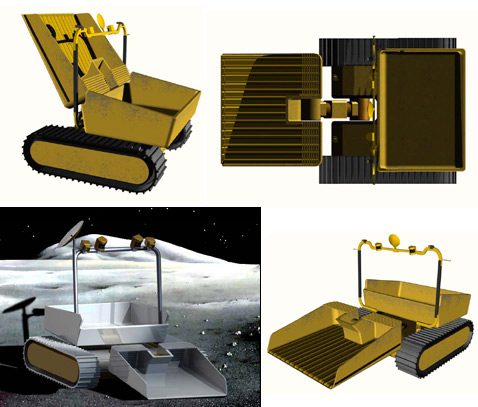 Второй робот. Кстати, предполагается, что для управления им будет использовано сочетание команд с Земли (режим дистанционного пилотирования) с автономным выполнением заданий под "надзором" искусственного интеллекта на борту машины (иллюстрации Astrobotic Technology/Mark Maxwell). Второй робот. Кстати, предполагается, что для управления им будет использовано сочетание команд с Земли (режим дистанционного пилотирования) с автономным выполнением заданий под "надзором" искусственного интеллекта на борту машины (иллюстрации Astrobotic Technology/Mark Maxwell). Режим виброукладчика показан для варианта робота без самосвального кузова (иллюстрация Astrobotic Technology/Mark Maxwell). Режим виброукладчика показан для варианта робота без самосвального кузова (иллюстрация Astrobotic Technology/Mark Maxwell).В таком варианте грузоподъёмность гусеничных машинок поднялась до 30% от веса пустой конструкции, что и сократило время строительства насыпи до тех самых 5 месяцев.
А чтобы насыпь получалась более прочной, авторы проекта придумали трюк, превращающим робота-копателя в виброукладчик. Насыпав очередную порцию грунта, аппарат должен перевернуться, опираясь на ковш, и немного "попрыгать" на лунном песке. Ещё лучше, рассудили в Astrobotic, если специальные машины будут просеивать реголит в поисках небольших (до 15 сантиметров) камней и гравия, которые можно было бы выкладывать на площадке или на стенах бруствера для выравнивания и укрепления последних. Единственное, что пока неясно: сколько такого стройматериала можно насобирать в окрестностях будущей базы. Не исключено, что роботам потребуется проехать сотни, а то и тысячи километров в поисках желаемых каменюк. Тут также есть выход: нечто вроде бороны с устройством улавливания камней могли бы тянуть за собой те же самые бульдозеры-самосвалы, пока будут копать лунную пыль для возведения огромной насыпи. 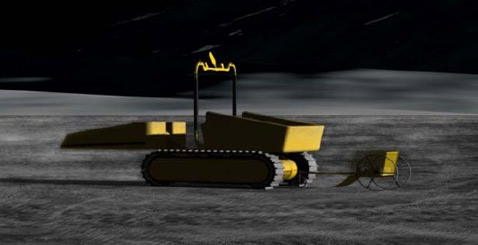 Так робот-бульдозер должен тянуть за собой "борону" (иллюстрация Astrobotic Technology/Mark Maxwell). Так робот-бульдозер должен тянуть за собой "борону" (иллюстрация Astrobotic Technology/Mark Maxwell).Вообще же применение каменной кладки может быть хорошим дополнением к возведению бруствера, способным снизить требования к его объёму, а значит — ускорить работы. Таков план Astrobotic Technology. Но это не единственный вариант обработки реголита на месте будущей базы. К примеру, ранее специалисты высказывали предположение, что команда роботов-микроволновок могла бы расплавить тонкий верхний слой пыли, превратив его в нечто вроде стекла и тем самым предотвратив подъём опасных частиц "в воздух" во время работ на базе и прибытия ракет. Необходимо ещё оценить, сколько энергии может уйти на такое разглаживание местности. 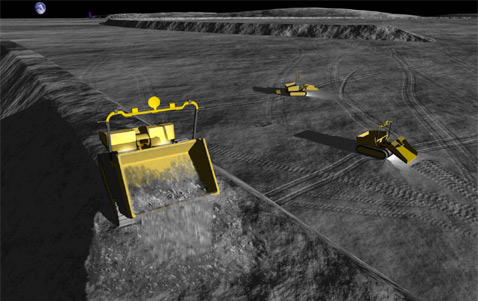 Дополнительная масса и сложность, которые добавляются при монтаже небольшого самосвального кузова, оправдываются ускорением работ, – сообщает компания. А если на месте базы высадить четыре-шесть таких машин – дело пойдёт куда веселее (иллюстрация Astrobotic Technology/Mark Maxwell). Дополнительная масса и сложность, которые добавляются при монтаже небольшого самосвального кузова, оправдываются ускорением работ, – сообщает компания. А если на месте базы высадить четыре-шесть таких машин – дело пойдёт куда веселее (иллюстрация Astrobotic Technology/Mark Maxwell).С другой стороны, и земляные работы силами нескольких роботов-бульдозеров также могут оказаться куда более сложными и затратными, нежели рисуется в набросках. Так, в 2007 году на первом соревновании лунных экскаваторов ни один робот не смог выполнить требования NASA, хотя копались они в "песочнице" (правда, с близкой имитацией реголита, а не с песком внутри). Astrobotic Technology смотрит на всё это с оптимизмом. Её концепция — ещё не рабочий проект, но уже понятно, что учёные и инженеры могут создать таких роботов. Компания предложила NASA, чтобы подготовку лунной базы доверили частной космической отрасли (намёк ясен).  Глядя на копошащихся в лунной пыли жёлтых роботов, поневоле вспоминаешь трогательного трудягу WALL•E, оставленного людьми для разбора гор мусора (иллюстрация Astrobotic Technology/Mark Maxwell). Глядя на копошащихся в лунной пыли жёлтых роботов, поневоле вспоминаешь трогательного трудягу WALL•E, оставленного людьми для разбора гор мусора (иллюстрация Astrobotic Technology/Mark Maxwell).И у фирмы есть все основания подключиться к такой работе. Для того чтобы выбрать наиболее удачную стратегию строительства защитных сооружений, нужно не просто подобрать правильное место для базы, но и изучить местность детальнее, узнать об имеющемся там грунте, о распределении и размерах камней, их "сплочённости", механических свойствах реголита и так далее. А Astrobotic уже добровольно взяла на себя такую инициативу: в её планах посылка на Селену нескольких посадочных зондов и луноходов, в том числе — в очень интересующий NASA кратер Шеклтона (Shackleton) на южном полюсе. Может, рвение частной компании будет по достоинству оценено после первого её успеха? Ждать осталось не так уж долго: Astrobotic планирует высадить на Луне свой первый луноход в декабре 2010 года. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
